Come creare un'intelligenza artificiale di un cervo in unità
Nello sviluppo del gioco, aggiungere Intelligenza artificiale significa scrivere codice che controllerà l'entità del gioco senza alcun input esterno.
L'IA animale nei giochi è un ramo dell'IA che mira a tradurre il comportamento degli animali nell'ambiente digitale del gioco per creare un'esperienza realistica.
In questo tutorial, mostrerò come creare una semplice IA animale (Cervo) in Unity che avrà due stati, inattivo e in fuga.
Passaggio 1: preparare la scena e il modello di cervo
Avremo bisogno di un livello e di un modello di cervo.
Per il livello, userò un semplice terreno con erba e alberi:

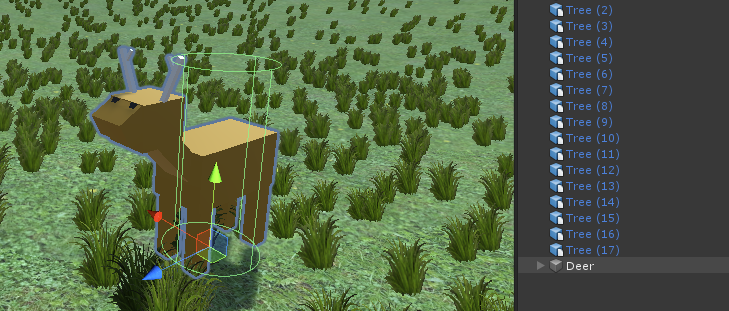
Per il modello Cervo ho semplicemente combinato alcuni Cubi (ma puoi usare questo modello Cervo):

Ora passiamo alla parte di codifica.
Passaggio 2: configurare il controller del lettore
Iniziamo impostando un controller giocatore in modo da poter camminare e testare l'IA:
- Crea un nuovo script, chiamalo SC_CharacterController e incolla il codice sottostante al suo interno:
SC_CharacterController.cs
using UnityEngine;
[RequireComponent(typeof(CharacterController))]
public class SC_CharacterController : MonoBehaviour
{
public float speed = 7.5f;
public float jumpSpeed = 8.0f;
public float gravity = 20.0f;
public Camera playerCamera;
public float lookSpeed = 2.0f;
public float lookXLimit = 45.0f;
CharacterController characterController;
Vector3 moveDirection = Vector3.zero;
Vector2 rotation = Vector2.zero;
[HideInInspector]
public bool canMove = true;
void Start()
{
characterController = GetComponent<CharacterController>();
rotation.y = transform.eulerAngles.y;
}
void Update()
{
if (characterController.isGrounded)
{
// We are grounded, so recalculate move direction based on axes
Vector3 forward = transform.TransformDirection(Vector3.forward);
Vector3 right = transform.TransformDirection(Vector3.right);
float curSpeedX = speed * Input.GetAxis("Vertical");
float curSpeedY = speed * Input.GetAxis("Horizontal");
moveDirection = (forward * curSpeedX) + (right * curSpeedY);
if (Input.GetButton("Jump"))
{
moveDirection.y = jumpSpeed;
}
}
// Apply gravity. Gravity is multiplied by deltaTime twice (once here, and once below
// when the moveDirection is multiplied by deltaTime). This is because gravity should be applied
// as an acceleration (ms^-2)
moveDirection.y -= gravity * Time.deltaTime;
// Move the controller
characterController.Move(moveDirection * Time.deltaTime);
// Player and Camera rotation
if (canMove)
{
rotation.y += Input.GetAxis("Mouse X") * lookSpeed;
rotation.x += -Input.GetAxis("Mouse Y") * lookSpeed;
rotation.x = Mathf.Clamp(rotation.x, -lookXLimit, lookXLimit);
playerCamera.transform.localRotation = Quaternion.Euler(rotation.x, 0, 0);
transform.eulerAngles = new Vector2(0, rotation.y);
}
}
}![]()
- Crea un nuovo GameObject e chiamalo "Player" e cambia il suo tag in "Player"
- Crea una nuova Capsule (GameObject -> Oggetto 3D -> Capsule), quindi rendila un oggetto figlio dell'oggetto "Player", cambia la sua posizione in (0, 1, 0) e rimuovi il suo componente CapsuleCollider.
- Sposta la videocamera principale all'interno dell'oggetto "Player" e cambia la sua posizione in (0, 1.64, 0)
- Allega script SC_CharacterController a un oggetto "Player" (noterai che aggiungerà anche un altro componente chiamato Controller carattere. Imposta il suo valore centrale su (0, 1, 0))
- Assegna la videocamera principale alla variabile "Player Camera" in SC_CharacterController, quindi salva la scena
Il controller del lettore è ora pronto.

Passaggio 3: programma Deer AI
Ora passiamo alla parte in cui programmiamo un Deer AI:
- Crea un nuovo script e chiamalo SC_DeerAI (questo script controllerà il movimento dell'IA):
![]()
Apri SC_DeerAI e continua i passaggi seguenti:
All'inizio dello script, ci assicuriamo che tutte le classi necessarie siano incluse (nello specifico UnityEngine.AI):
using UnityEngine;
using UnityEngine.AI;
using System.Collections.Generic;
public class SC_DeerAI : MonoBehaviour
{Ora aggiungiamo tutte le variabili:
public enum AIState { Idle, Walking, Eating, Running }
public AIState currentState = AIState.Idle;
public int awarenessArea = 15; //How far the deer should detect the enemy
public float walkingSpeed = 3.5f;
public float runningSpeed = 7f;
public Animator animator;
//Trigger collider that represents the awareness area
SphereCollider c;
//NavMesh Agent
NavMeshAgent agent;
bool switchAction = false;
float actionTimer = 0; //Timer duration till the next action
Transform enemy;
float range = 20; //How far the Deer have to run to resume the usual activities
float multiplier = 1;
bool reverseFlee = false; //In case the AI is stuck, send it to one of the original Idle points
//Detect NavMesh edges to detect whether the AI is stuck
Vector3 closestEdge;
float distanceToEdge;
float distance; //Squared distance to the enemy
//How long the AI has been near the edge of NavMesh, if too long, send it to one of the random previousIdlePoints
float timeStuck = 0;
//Store previous idle points for reference
List<Vector3> previousIdlePoints = new List<Vector3>(); Poi inizializziamo tutto nel void Start():
// Start is called before the first frame update
void Start()
{
agent = GetComponent<NavMeshAgent>();
agent.stoppingDistance = 0;
agent.autoBraking = true;
c = gameObject.AddComponent<SphereCollider>();
c.isTrigger = true;
c.radius = awarenessArea;
//Initialize the AI state
currentState = AIState.Idle;
actionTimer = Random.Range(0.1f, 2.0f);
SwitchAnimationState(currentState);
}(Come puoi vedere, aggiungiamo uno Sphere Collider che è contrassegnato come Trigger. Questo collider fungerà da area di consapevolezza quando il nemico vi entra).
L'attuale logica AI viene eseguita nel void Update() con alcune funzioni di supporto:
// Update is called once per frame
void Update()
{
//Wait for the next course of action
if (actionTimer > 0)
{
actionTimer -= Time.deltaTime;
}
else
{
switchAction = true;
}
if (currentState == AIState.Idle)
{
if(switchAction)
{
if (enemy)
{
//Run away
agent.SetDestination(RandomNavSphere(transform.position, Random.Range(1, 2.4f)));
currentState = AIState.Running;
SwitchAnimationState(currentState);
}
else
{
//No enemies nearby, start eating
actionTimer = Random.Range(14, 22);
currentState = AIState.Eating;
SwitchAnimationState(currentState);
//Keep last 5 Idle positions for future reference
previousIdlePoints.Add(transform.position);
if (previousIdlePoints.Count > 5)
{
previousIdlePoints.RemoveAt(0);
}
}
}
}
else if (currentState == AIState.Walking)
{
//Set NavMesh Agent Speed
agent.speed = walkingSpeed;
// Check if we've reached the destination
if (DoneReachingDestination())
{
currentState = AIState.Idle;
}
}
else if (currentState == AIState.Eating)
{
if (switchAction)
{
//Wait for current animation to finish playing
if(!animator || animator.GetCurrentAnimatorStateInfo(0).normalizedTime - Mathf.Floor(animator.GetCurrentAnimatorStateInfo(0).normalizedTime) > 0.99f)
{
//Walk to another random destination
agent.destination = RandomNavSphere(transform.position, Random.Range(3, 7));
currentState = AIState.Walking;
SwitchAnimationState(currentState);
}
}
}
else if (currentState == AIState.Running)
{
//Set NavMesh Agent Speed
agent.speed = runningSpeed;
//Run away
if (enemy)
{
if (reverseFlee)
{
if (DoneReachingDestination() && timeStuck < 0)
{
reverseFlee = false;
}
else
{
timeStuck -= Time.deltaTime;
}
}
else
{
Vector3 runTo = transform.position + ((transform.position - enemy.position) * multiplier);
distance = (transform.position - enemy.position).sqrMagnitude;
//Find the closest NavMesh edge
NavMeshHit hit;
if (NavMesh.FindClosestEdge(transform.position, out hit, NavMesh.AllAreas))
{
closestEdge = hit.position;
distanceToEdge = hit.distance;
//Debug.DrawLine(transform.position, closestEdge, Color.red);
}
if (distanceToEdge < 1f)
{
if(timeStuck > 1.5f)
{
if(previousIdlePoints.Count > 0)
{
runTo = previousIdlePoints[Random.Range(0, previousIdlePoints.Count - 1)];
reverseFlee = true;
}
}
else
{
timeStuck += Time.deltaTime;
}
}
if (distance < range * range)
{
agent.SetDestination(runTo);
}
else
{
enemy = null;
}
}
//Temporarily switch to Idle if the Agent stopped
if(agent.velocity.sqrMagnitude < 0.1f * 0.1f)
{
SwitchAnimationState(AIState.Idle);
}
else
{
SwitchAnimationState(AIState.Running);
}
}
else
{
//Check if we've reached the destination then stop running
if (DoneReachingDestination())
{
actionTimer = Random.Range(1.4f, 3.4f);
currentState = AIState.Eating;
SwitchAnimationState(AIState.Idle);
}
}
}
switchAction = false;
}
bool DoneReachingDestination()
{
if (!agent.pathPending)
{
if (agent.remainingDistance <= agent.stoppingDistance)
{
if (!agent.hasPath || agent.velocity.sqrMagnitude == 0f)
{
//Done reaching the Destination
return true;
}
}
}
return false;
}
void SwitchAnimationState(AIState state)
{
//Animation control
if (animator)
{
animator.SetBool("isEating", state == AIState.Eating);
animator.SetBool("isRunning", state == AIState.Running);
animator.SetBool("isWalking", state == AIState.Walking);
}
}
Vector3 RandomNavSphere(Vector3 origin, float distance)
{
Vector3 randomDirection = Random.insideUnitSphere * distance;
randomDirection += origin;
NavMeshHit navHit;
NavMesh.SamplePosition(randomDirection, out navHit, distance, NavMesh.AllAreas);
return navHit.position;
}(Ogni stato inizializza i valori e il bersaglio dell'agente NavMesh per lo stato successivo. Ad esempio, lo stato Idle ha 2 possibili esiti, inizializza lo stato Running se il nemico è presente o lo stato Mangia se nessun nemico ha attraversato l'area di consapevolezza.
Uno stato di camminata viene utilizzato tra gli stati di Mangiare per spostarsi verso la nuova destinazione.
Lo stato di corsa calcola la direzione relativa alla posizione nemica, per correre direttamente da essa.
Se bloccato in un angolo, l'IA si ritrae in una delle posizioni inattive salvate in precedenza. Il nemico è perso dopo che l'IA è abbastanza lontana dal nemico).
Infine, aggiungiamo un evento OnTriggerEnter che monitorerà lo Sphere Collider (noto anche come Awareness Area) e inizializzerà lo stato Running una volta che il nemico si avvicina troppo:
void OnTriggerEnter(Collider other)
{
//Make sure the Player instance has a tag "Player"
if (!other.CompareTag("Player"))
return;
enemy = other.transform;
actionTimer = Random.Range(0.24f, 0.8f);
currentState = AIState.Idle;
SwitchAnimationState(currentState);
}Non appena il giocatore entra nel trigger, viene assegnata la variabile nemica e viene inizializzato lo stato Idle, dopodiché viene inizializzato lo stato Running.
Di seguito è riportato lo script SC_DeerAI.cs finale:
//You are free to use this script in Free or Commercial projects
//sharpcoderblog.com @2019
using UnityEngine;
using UnityEngine.AI;
using System.Collections.Generic;
public class SC_DeerAI : MonoBehaviour
{
public enum AIState { Idle, Walking, Eating, Running }
public AIState currentState = AIState.Idle;
public int awarenessArea = 15; //How far the deer should detect the enemy
public float walkingSpeed = 3.5f;
public float runningSpeed = 7f;
public Animator animator;
//Trigger collider that represents the awareness area
SphereCollider c;
//NavMesh Agent
NavMeshAgent agent;
bool switchAction = false;
float actionTimer = 0; //Timer duration till the next action
Transform enemy;
float range = 20; //How far the Deer have to run to resume the usual activities
float multiplier = 1;
bool reverseFlee = false; //In case the AI is stuck, send it to one of the original Idle points
//Detect NavMesh edges to detect whether the AI is stuck
Vector3 closestEdge;
float distanceToEdge;
float distance; //Squared distance to the enemy
//How long the AI has been near the edge of NavMesh, if too long, send it to one of the random previousIdlePoints
float timeStuck = 0;
//Store previous idle points for reference
List<Vector3> previousIdlePoints = new List<Vector3>();
// Start is called before the first frame update
void Start()
{
agent = GetComponent<NavMeshAgent>();
agent.stoppingDistance = 0;
agent.autoBraking = true;
c = gameObject.AddComponent<SphereCollider>();
c.isTrigger = true;
c.radius = awarenessArea;
//Initialize the AI state
currentState = AIState.Idle;
actionTimer = Random.Range(0.1f, 2.0f);
SwitchAnimationState(currentState);
}
// Update is called once per frame
void Update()
{
//Wait for the next course of action
if (actionTimer > 0)
{
actionTimer -= Time.deltaTime;
}
else
{
switchAction = true;
}
if (currentState == AIState.Idle)
{
if(switchAction)
{
if (enemy)
{
//Run away
agent.SetDestination(RandomNavSphere(transform.position, Random.Range(1, 2.4f)));
currentState = AIState.Running;
SwitchAnimationState(currentState);
}
else
{
//No enemies nearby, start eating
actionTimer = Random.Range(14, 22);
currentState = AIState.Eating;
SwitchAnimationState(currentState);
//Keep last 5 Idle positions for future reference
previousIdlePoints.Add(transform.position);
if (previousIdlePoints.Count > 5)
{
previousIdlePoints.RemoveAt(0);
}
}
}
}
else if (currentState == AIState.Walking)
{
//Set NavMesh Agent Speed
agent.speed = walkingSpeed;
// Check if we've reached the destination
if (DoneReachingDestination())
{
currentState = AIState.Idle;
}
}
else if (currentState == AIState.Eating)
{
if (switchAction)
{
//Wait for current animation to finish playing
if(!animator || animator.GetCurrentAnimatorStateInfo(0).normalizedTime - Mathf.Floor(animator.GetCurrentAnimatorStateInfo(0).normalizedTime) > 0.99f)
{
//Walk to another random destination
agent.destination = RandomNavSphere(transform.position, Random.Range(3, 7));
currentState = AIState.Walking;
SwitchAnimationState(currentState);
}
}
}
else if (currentState == AIState.Running)
{
//Set NavMesh Agent Speed
agent.speed = runningSpeed;
//Run away
if (enemy)
{
if (reverseFlee)
{
if (DoneReachingDestination() && timeStuck < 0)
{
reverseFlee = false;
}
else
{
timeStuck -= Time.deltaTime;
}
}
else
{
Vector3 runTo = transform.position + ((transform.position - enemy.position) * multiplier);
distance = (transform.position - enemy.position).sqrMagnitude;
//Find the closest NavMesh edge
NavMeshHit hit;
if (NavMesh.FindClosestEdge(transform.position, out hit, NavMesh.AllAreas))
{
closestEdge = hit.position;
distanceToEdge = hit.distance;
//Debug.DrawLine(transform.position, closestEdge, Color.red);
}
if (distanceToEdge < 1f)
{
if(timeStuck > 1.5f)
{
if(previousIdlePoints.Count > 0)
{
runTo = previousIdlePoints[Random.Range(0, previousIdlePoints.Count - 1)];
reverseFlee = true;
}
}
else
{
timeStuck += Time.deltaTime;
}
}
if (distance < range * range)
{
agent.SetDestination(runTo);
}
else
{
enemy = null;
}
}
//Temporarily switch to Idle if the Agent stopped
if(agent.velocity.sqrMagnitude < 0.1f * 0.1f)
{
SwitchAnimationState(AIState.Idle);
}
else
{
SwitchAnimationState(AIState.Running);
}
}
else
{
//Check if we've reached the destination then stop running
if (DoneReachingDestination())
{
actionTimer = Random.Range(1.4f, 3.4f);
currentState = AIState.Eating;
SwitchAnimationState(AIState.Idle);
}
}
}
switchAction = false;
}
bool DoneReachingDestination()
{
if (!agent.pathPending)
{
if (agent.remainingDistance <= agent.stoppingDistance)
{
if (!agent.hasPath || agent.velocity.sqrMagnitude == 0f)
{
//Done reaching the Destination
return true;
}
}
}
return false;
}
void SwitchAnimationState(AIState state)
{
//Animation control
if (animator)
{
animator.SetBool("isEating", state == AIState.Eating);
animator.SetBool("isRunning", state == AIState.Running);
animator.SetBool("isWalking", state == AIState.Walking);
}
}
Vector3 RandomNavSphere(Vector3 origin, float distance)
{
Vector3 randomDirection = Random.insideUnitSphere * distance;
randomDirection += origin;
NavMeshHit navHit;
NavMesh.SamplePosition(randomDirection, out navHit, distance, NavMesh.AllAreas);
return navHit.position;
}
void OnTriggerEnter(Collider other)
{
//Make sure the Player instance has a tag "Player"
if (!other.CompareTag("Player"))
return;
enemy = other.transform;
actionTimer = Random.Range(0.24f, 0.8f);
currentState = AIState.Idle;
SwitchAnimationState(currentState);
}
}- Posiziona il modello di cervo nella scena e allega un agente NavMesh, lo script SC_DeerAI e Animatore componente ad esso:

SC_DeerAI ha solo una variabile che deve essere assegnata che è "Animator".
Il componente animatore richiede un Controller con 4 animazioni: Idle Animation, Walking Animation, Eating Animation e Running Animation e 3 parametri bool: isEating, isRunning e isWalking:

Puoi imparare come configurare un semplice controller animatore facendo clic qui
Dopo che tutto è stato assegnato, resta un'ultima cosa da fare, ovvero cuocere un NavMesh.
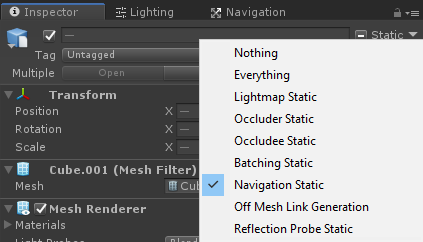
- Seleziona tutti gli oggetti della scena che saranno statici (es. terreno, alberi, ecc.) e contrassegnali come "Navigation Static":
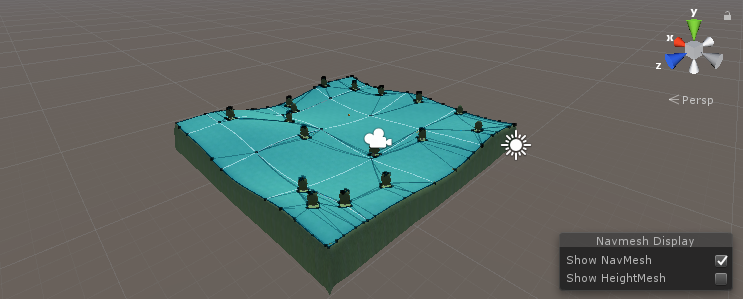
- Vai alla finestra di navigazione (Finestra -> AI -> Navigazione) e fai clic sulla scheda "Bake", quindi fai clic sul pulsante "Bake". Dopo che il NavMesh è cotto, dovrebbe assomigliare a questo:
Dopo che NavMesh è stato cotto, possiamo testare l'intelligenza artificiale:

Tutto funziona come previsto. Il Cervo scappa quando il nemico è vicino e riprende le sue normali attività una volta che il nemico è abbastanza lontano.